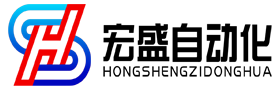
STEP 7-MicroWin SMART 软件在使用运动向导进行配置时,需要在运动控制向导的组态界面,首先定义电机速度、点动速度、点动增量等参数。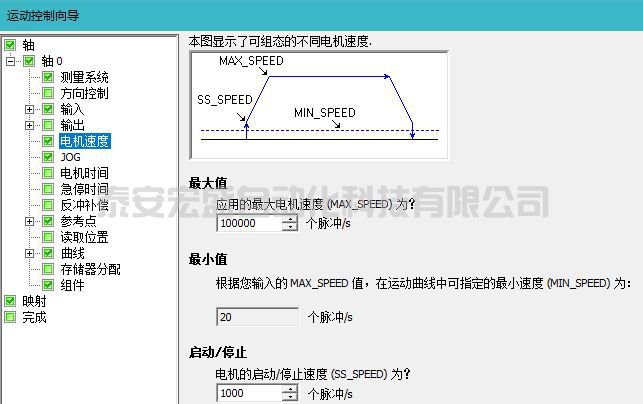
图1. 运动控制回路向导参数设置界面
当程序运行后,运动控制功能的参数可以通过软件状态图表在线修改或者通过上位机、触摸屏等外部设备修改,来实现运动控制参数的修改。
通过外部修改电机速度、点动速度、点动增量等参数
使用运动控制向导进行配置时,在组态界面最后会进行存储器分配,见图 2。此处分配的 V 区地址防止冲突调用,本例中起始地址选择 VB0。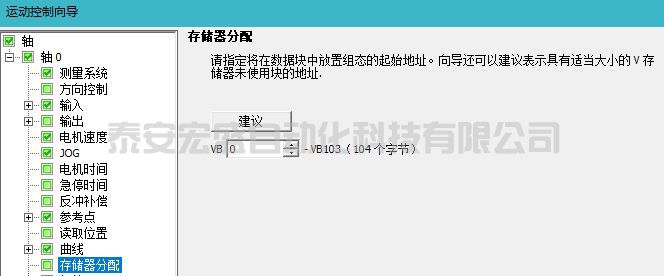
图2. 运动控制向导存储器分配
查询 PLC 的数据块 AXISx_DATA,见图 3。如用户希望能够在触摸屏上修改电机最大速度,在数据块中找到相应的地址VD50,修改地址内的数值。
图3. 运动控制数据块
修改完数值后需要调用AXISx_CFG指令,重新加载组态,见图 4。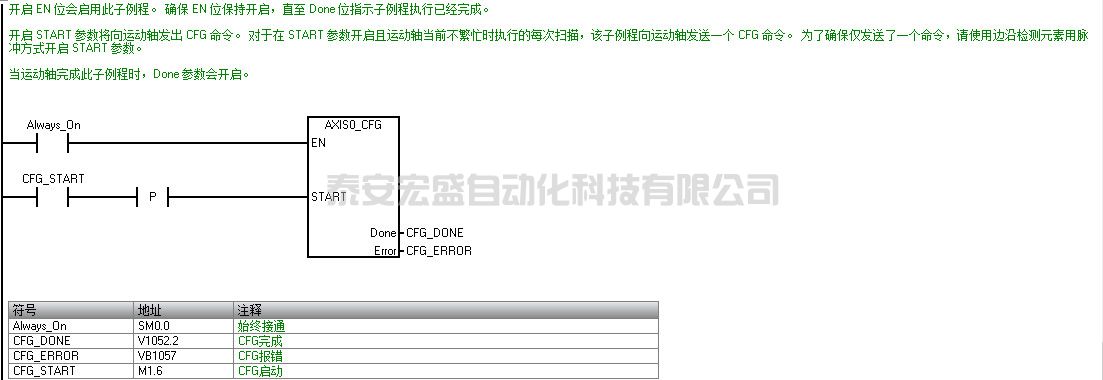
图4. CFG指令