S7-1200 PID Compact V1 指令介绍
PID指令块的参数分为两部分,输入参数与输出参数,指令块的视图分为扩展视图与集成视图,在不同的视图下所能看见的参数是不一样的,在集成视图中可看到的参数为最基本的默认参数,如给定值,反馈值,输出值等定义这些参数可实现控制器最基本的控制功能,而在扩展视图中,可看到更多的相关参数,如手自动切换,高低限报警等,使用这些参数可使控制器具有更丰富的功能。如图 1
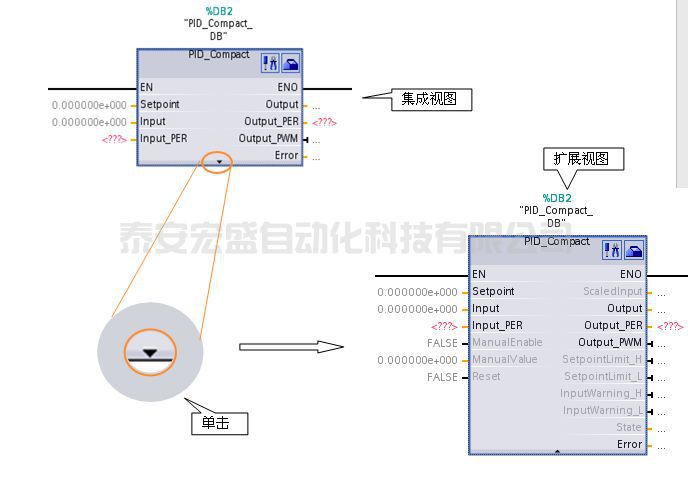
图1 PID指令块
表1 输入参数
参数 | 数据类型 | 描述 |
Setpoint | REAL | 自动模式下的给定值 |
Input | REAL | 实数类型反馈值 |
Input_PER | WORD | 整数类型反馈值,可用于连接模拟量外设输入 |
ManualEnable | BOOL | 0到1 上升沿 = "手动模式" |
ManualValue | REAL | 手动模式下的输出值 |
Reset | BOOL | 复位控制器与错误 |
表2 输出参数
参数 | 数据类型 | 描述 |
ScaledInput | REAL | 当前的输入值 |
Output | REAL | 实数类型输出值 |
Output_PER | WORD | 整数类型输出值 |
Output_PWM | BOOL | PWM输出 |
SetpointLimit_H | BOOL | 当给定值大于高限时置 |
SetpointLimit_L | BOOL | 当给定值小于低限时置 |
InputWarning_H | BOOL | 当反馈值超过高限报警时置 |
InputWarning_L | BOOL | 当反馈值低于低限报警时置 |
State | INT | 控制器状态0=Inactive,1=SUT,2=TIR,3=Automatic,4=Manual |
表3 State状态
State状态 | 描述 |
0 := Inactive(未激活) | - 第一次下载 |
1 :Start Up整定方式 | - 相对应的调试过程进行中 |
3 := Automatic Mode自动模式 | 0 到1 上升沿 使能 "Manual mode"(手动模式) |
表4 错误代码
错误代号(W#32#...) | 描述 |
0000 0000 | 无错误. |
0000 0001 | 实际值超过组态限制 |
0000 0002 | 参数 "Input_PER" 端有非法值 |
0000 0004 | “运行自整定”模式中发生错误.反馈值的震荡无法被保持 |
0000 0008 | “启动自整定”模式发生错误. 反馈值太接近与给定值 |
0000 0010 | 自整定时设定值改变 |
0000 0020 | 在运行启动自整定模式时,PID控制器处于自动状态,此状态无法运行启动自整定 |
0000 0040 | “运行自整定”发生错误. |
0000 0080 | 输出的设定值限制未正确组态 |
0000 0100 | 非法参数导致自整定错误 |
0000 0200 | 反馈参数数据值非法 |
0000 0400 | 输出参数数据值非法 |
0000 0800 | 采样时间错误指令块被OB1调用或循环中断块的中断时间被修改了 |
0000 1000 | 设定值参数数据非法,数据值超出表示范围(数据值小于 -1e12 或大于 1e12) |
工艺对象背景数据块
工艺对象数据块存储了控制器所有相关的参数
添加工艺对象数据块:
Project tree→Technological Objects→Add new object,在弹出的对话框中定义如图 2
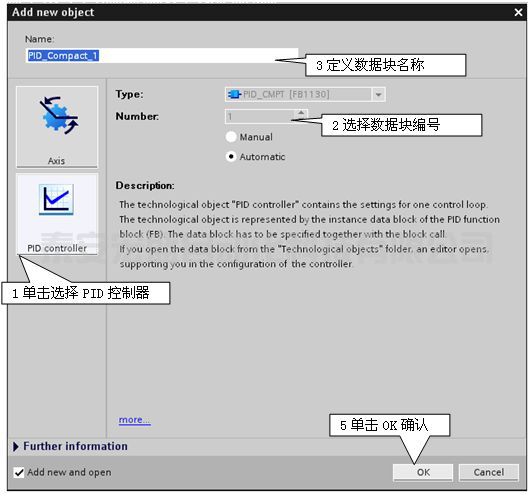
图2 添加工艺对象数据块
打开工艺对象数据块:
选择Project tree→Technological Objects→PID_Compact_DB。如图2

图2 打开工艺对象数据块
工艺对象数据块主要分5部分:1 static 2 sBackUp 3 sPid_Calc 4 sPid_Cmpt 5 sRet
1 Static参数
表5 Static 参数
Static | 名称 | 数据类型 | 描述 |
sd_VersionID | DWORD | 控制器版本(eg. 1.0.0.9) | |
sb_GetCycleTime | BOOL | 开始自动预估采样时间 | |
sb_EnCyclEstimation | BOOL | 使能预估采样时间 | |
sb_EnCyclMonitoring | BOOL | 使能监视采样时间 | |
sb_RunModeByStartup | BOOL | 在复位或上电后保持上一次状态或保持Inactive未激活状态 | |
si_Unit | INT | 反馈量单位 | |
si_Type | INT | 控制器类型 | |
sd_Warning | DWORD | 警示信息 | |
2 sBackUp参数
表6 sBackUp
sBackUp | 名称 | 数据类型 | 从上一次整定开始已保存的参数 |
r_Gain | REAL | 已保存的增益 | |
r_Ti | REAL | 已保存的积分时间 | |
r_Td | REAL | 已保存的微分时间 | |
r_A | REAL | 已保存存的微分滤波系数 | |
r_B | REAL | 已保存的比例部分在直接/反馈路径的权重 | |
r_C | REAL | 已保存的微分部分在直接/反馈路径的权重 | |
r_Cycle | REAL | 已保存的控制器采样时间 |
3 sPid_Calc参数
表7 sPid_Calc
sPid_Calc | 名称 | 数据类型 | 描述 |
r_Cycle | REAL | 采样时间 | |
b_RunIn | BOOL | 强制在设定点运行 | |
b_CalcParamSUT | BOOL | 重新计算启动整定参数 | |
b_CalcParamTIR | BOOL | 重新计算运行整定参数 | |
i_CtrlTypeSUT | INT | 起始整定模式(0-CHR PID,1-CHR PI) | |
i_CtrlTypeTIR | INT | 运行整定模式 (0-2-A PID auto/fast/slow,3-ZN PID,4-ZN PI,5-ZN P) |
4 sPid_Cmpt参数
表8 sPid_Cmpt
sPid_Cmpt | 名称 | 数据类型 | 描述 |
r_Sp_Hlm | REAL | 设定值高限 | |
r_Sp_Llm | REAL | 设定值低限 | |
r_Pv_Norm_IN_1 | REAL | 输入量程化低限 | |
r_Pv_Norm_IN_2 | REAL | 输入量程化高限 | |
r_Pv_Norm_OUT_1 | REAL | 输出量程化低限 | |
r_Pv_Norm_OUT_2 | REAL | 输出量程化高限 | |
r_Lmn_Hlm | REAL | 输出高限 | |
r_Lmn_Llm | REAL | 输出低限 | |
b_Input_PER_On | BOOL | 激活从外设输入的反馈值 | |
b_LoadBackUp | BOOL | 回复上一次的参数备份PID参数 | |
b_InvCtrl | BOOL | 使能反向 | |
r_Lmn_Pwm_PPTm | REAL | PWM 最小开时间 | |
r_Lmn_Pwm_PBTm | REAL | PWM 最小关时间 | |
r_Pv_Hlm | REAL | 反馈高限 | |
r_Pv_Llm | REAL | 反馈低限 | |
r_Pv_HWrn | REAL | 反馈报警高限 | |
r_Pv_LWrn | REAL | 反馈报警低限 |
5 sRet参数
表9 sRet
sRet | 名称 | 数据类型 | 描述 |
i_Mode | INT | 设置控制器模式 (0=Inactive(未激活),1=SUT(启动整定模式),2=TIR(运行整定模式),3=Automatic(自动模式),4=Hand(手动模式) | |
r_Ctrl_Gain | REAL | 当前增益 | |
r_Ctrl_Ti | REAL | 当前积分时间 | |
r_Ctrl_Td | REAL | 当前微分时间 | |
r_Ctrl_A | REAL | 当前微分部分滤波系数 | |
r_Ctrl_B | REAL | 在直接反馈路径中的比例加权 | |
r_Ctrl_C | REAL | 在直接反馈路径中的微分加权 | |
r_Ctrl_Cycle | REAL | 当前采样时间 |