程序案例
-
 162026-01
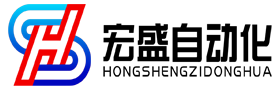
162026-01S7-1200 Modbus TCP 通信服务器指令块 MB_SERVER
STEP 7 V13 SP1 软件版本中的 Modbus TCP 指令目前最新的版本已升至 V4.0,如图 1 所示。该版本的使用需要具备以下两个条件:1. 软件版本: STEP 7 V13 SP1 及其以上2. 固件版本: S7-1200...
-
 162026-01
162026-01S7-1200集成PN接口MODBUS TCP通信概述
Modbus TCP是标准的网络通信协议,通过CPU上PN接口进行TCP/IP通信,不需要额外的通信硬件模块,Modbus TCP使用开放式用户通信连接作为Modbus通信路径,所支持的混合客户机和服务器连接数最大为CPU所允许的最大开放式...
-
 212025-11
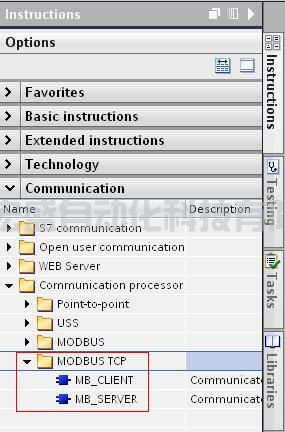
212025-11分程控制、阀位控制、分级控制
尽量保留原有的控制方案,是先进控制和控制方案设计的基本原则在上文提到如下图的工艺过程,保证液位控制的前提下,尽可能多用回收水,有多种解决方案。分程控制:先开回收水调节阀FV2,再开新鲜水调节阀FV1,使用专门的分程控制模块。阀位控制:使用新...
-
 182025-11
182025-11如何通过符号I/O域切换画面?
1. 概述通常是通过组态按钮”激活屏幕“函数实现画面的切换。如果希望通过下拉选择的方式实现切换画面的话,可以参考本文档中的方法。2. 组态通过符号I/O域切换画面 2.1 组态变量在触摸屏变量表中添加变量 “Tag_ScreenNumbe...
-
 092025-11
092025-11海川HCD-G6系列变频器快速安装与启动指南
海川HCD-G6系列变频器快速安装与启动指南安装请检查 外观——检查是否因运输不慎而造成损伤;一致性——检查产品规格、型号是否与所订机种一致;安装环境——变频器应安装在与所选防护等级相适应,温度适宜的,可控的室内环境中;接线——遵守当地的接...
-
 282025-10
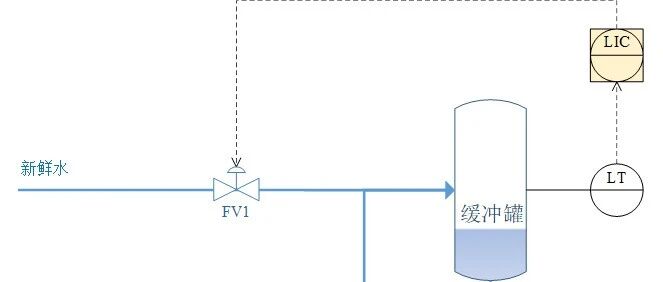
282025-102极,4极,6极三相异步电动机的转速为多少?有何区别?
三相异步电动机的“极数”是指电机上励磁绕组的磁极数。具体怎么分类,不同级数的电动机有何区别呢?下面大兰电机小编总结一下,希望对不懂的朋友有所帮助。异步电机转速是分级的,是由电动机的“极数”决定的。极数反映出电动机的同步转速,2极也可以叫一个...
-
 242025-09
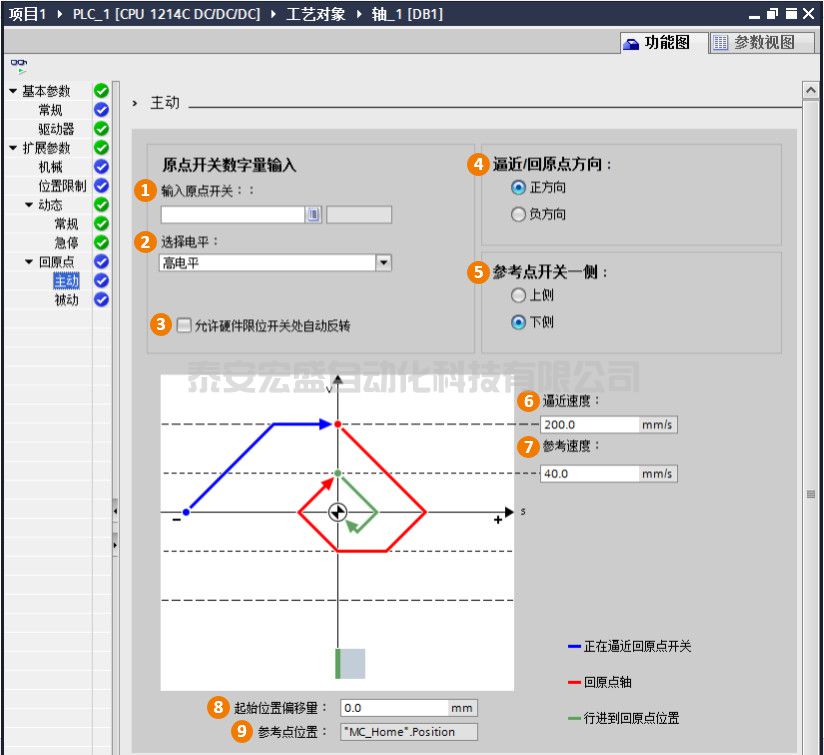
242025-09西门子功能图--扩展参数-回原点
功能图--扩展参数-回原点“原点”也可以叫做“参考点”,“回原点”或是“寻找参考点”的作用是:把轴实际的机械位置和S7-1200程序中轴的位置坐标统一,以进行绝对位置定位。一般情况下,西门子PLC的运动控制在使能绝对位置定位之前必须执行“回...
-
 242025-09
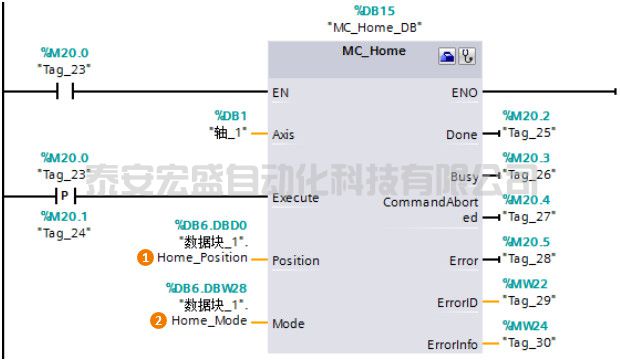
242025-09MC_Home回原点指令
MC_Home指令名称:回原点指令功能:使轴归位,设置参考点,用来将轴坐标与实际的物理驱动器位置进行匹配。使用要点:轴做绝对位置定位前一定要触发 MC_Home 指令。『注意』部分输入/输出管脚没有具体介绍,请用户参考 MC_Power 指...
-
 212025-09
212025-0924个污水处理工艺流程动图
一污水生物处理活性污泥法:二污水生物处理生物膜法三污水深度处理法 四污泥处理五自然生物处理法六工业废水物理化学处理 合建式缺氧-好氧活性污泥法脱氦工艺
-
 212025-09
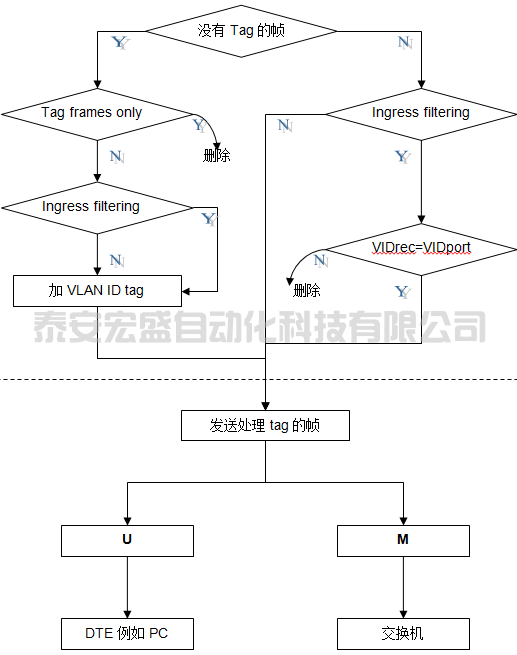
212025-09西门子交换机SCALANCE X VLAN组态快速入门
VLAN (Virtual LAN) 是可以不管物理位置而分配节点的网络。多播和广播帧只能在逻辑网络结构设置的限制内活动,限制的帧不能够发送到虚拟网络中。VLAN的特殊优点是为节点和其它VLAN网段降低网络负载。SCALANCE X 300...